Tutorials
Transform a behavior tree into a finite state machine
This tutorial will teach you how to use the algorithm in this package to transform a behavior tree into a functionally equivalent finite state machine.
Background
This implements the algorithm described in *Behavior Trees in Robotics and AI: An Introduction* by Michele Colledanchise, Petter Ögren. Of particular interest is the section 2.2.2 Creating a FSM that works like a BTs (page 29).
For our implementation, please refer to the Bt2FSM class.
Prerequisites
You need to have this package installed in your workspace. If you don’t have it, build it:
mkdir -p ~/colcon_ws/src
cd ~/colcon_ws/src
git clone https://github.com/boschresearch/bt_tools.git
cd ~/colcon_ws
colcon build --symlink-install --packages-select btlib
source ~/colcon_ws/devel/setup.bash
Input file
You can pass any behavior tree in the behaviortree.cpp format to the algorithm. For example simple_bt.xml:
<root BTCPP_format="4">
<BehaviorTree>
<Sequence>
<ServiceBtCondition name="TEST_CONDITION" />
<Fallback>
<ActionBtAction name="TEST_ACTION_A" />
<ActionBtAction name="TEST_ACTION_B" />
</Fallback>
</Sequence>
</BehaviorTree>
</root>
Call the algorithm
Then pass it to the script:
bt_to_fsm.py ~/colcon_ws/src/bt_tools/btlib/test/_test_data/bt2fsm/simple_bt.xml
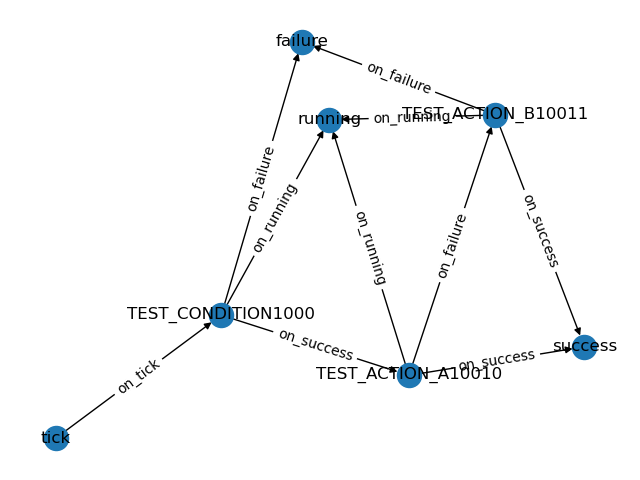
Output
This will generate a file called fsm.png in your current directory.
It will look something like this: